Solid-Look
Real-Time True Stereoscopic Vision - Brief History
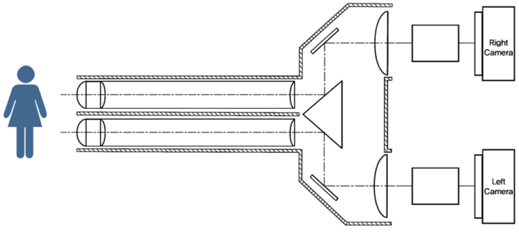
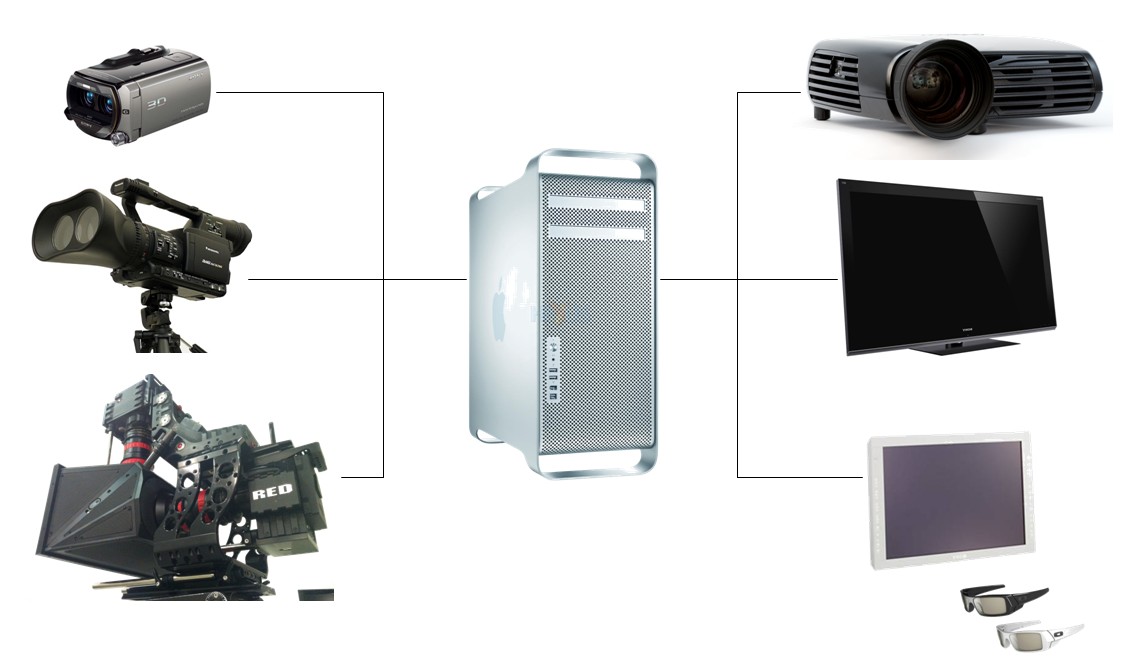
Solid-Look is a complete modular system that provides real-time
true 3D Stereoscopic visualization and recording
with encryption and authentication,
using any 3D cameras and any 3D display with or without glasses.
Below a short list of events that characterized the evolution of Solid-Look system.
- June 2005 -
Close-up of first HW prototype.
Started the design and development of Solid-Look.
- January 2006 -
Close-up of Solid-Look
Bristlecone NTSC zoom stereoscopic camera during the first demonstration.

- May 2006 -
Complete system with eye-tracking and stereo zoom camera.
- Jun 2006 -
Solid-Look presented at IABTI in Tampa,FL.
Example of Robot with stereo head mounted driving camera.

- June 2006 –
Integration with Holographic display at IABTI
First Full Operational Prototype of Solid Look for a Remotec Robot.
- October 2006 -
From Analog to Digital reducing thes size.
- October 2006 -
From Holographic to modular 3D Display.
Integration with Planar and DTI Displays.
- November 2006 -
Integration with Stereo Microscope.
- December 2006 -
Getting smaller and ligther.
From Dual to Quad CPUs.
- January 2007 -
Paper accepted Electronic Imaging 2007- SD&A
Showing the system at Electronic Imaging 2007- SD&A to the chair John Merritt - world stereoscopic visualization expert.
- March 2007 -
2k Full HD cameras compliant on base in synch.
Creating a stereo Full HD camera system.
- May 2007 -
Becoming Full Modular.
Compliant with all stereoscopic standards.From Quad to Dual Quad CPUs.
Including any type of cameras–displays–projectors.
- June 2007 -
Full HD recording and visualization in real time.
Entering the Medical market.
Dr. Assad Mora, President of AMED is using Solid-Look in dentist operations.
- September 2007 -
Integrated with “Da Vinci” Intuitive Surgical Laparoscopic 3D Robot.
- January 2008 -
First “Full HD” movie on micro dentistry recorded.
A short was projected at SD&A 2008 - 3D Theater.

- January 2008 -
Paper accepted at EI 2008 - SD&A.
(copyright: Steven Smith IN3D 2007)
- January 2008 -
Solid-Look Poster in exposition at the EI 2008 - SD&A.
- September 2008 -
ANDXOR founded Solid-Look Corporation aimed to work within the MIS (minimal invasive surgery) market.
- September 2008 -Mercurio Capital Partners funded Solid-Look Corporation to execute the validation phase of the existing solution for "da Vinci" robot
- October 2008 -
ANDXOR gave the esclusive right for the 3D medical market to Solid-Look Corporation.
- Year 2009 -ANDXOR supported Solid-Look Corporation during the development of EndoStereoVision for MIS (Minimal Invasive Surgery)
- April 2009 -
ANDXOR supported Solid-Look Corporation during the first worldwide transmission of a 3D High Def surgery (NY to Chicago)
- Year 2009 and 2010 -
ANDXOR supported Solid-Look Corporation during the installation of EndoStereoVision in the following hospitals:
- University of Illinois at Chicago
- New York Presbyterian
- Weill Cornell
- MATTU - University of Surrey
- SOFAR Milan, Italy
- June 2010 -
ANDXOR is pleased to announce that Solid-Look Corporation was mentioned in the June 2010 Economist magazine (science and technology - page 82 - june 2010)
- January 2011 -ANDXOR new Solid-Look 3D platform now supports Sony and LG and Samsung 3D display as well as the new 3D single lense full high definition LG projector
- January 2011 -
ANDXOR released a new version of Solid-Look software that support full high definition 3D picture/ frame capture while recording 3D HD video.
- February 2011 -
ANDXOR Solid-Look 3D system can be used with microscopes for recording 3D full HD video and capturing 3D full HD images at the same time.
- February 2011 -
ANDXOR Solid-Look 3D system now can be interfaced using and iPad or any existing Tablet.
User mobility allow faster operation and control.